
Nature offers us several examples of collective systems or multi-agent systems (e.g. schools of fishes or flocks of binds) which are able to accomplish some desired goals by appropriate strategies promoting some sort of self-organization. As programming techniques and computer capabilities evolve, control designs are also required to address control and optimization problems of ever-increasing scale and complexity, exhibiting self-organization properties inspired or imitating collective systems in nature. When dealing with uncertain collective systems, not only a central unit knowing the states of the entire system is absent, but knowledge of system dynamics is also lacking. In this setting, control and estimation must be accomplished using local information, e.g. lack of complete and global information should be compensated by distributed learning mechanisms.
Representative Themes
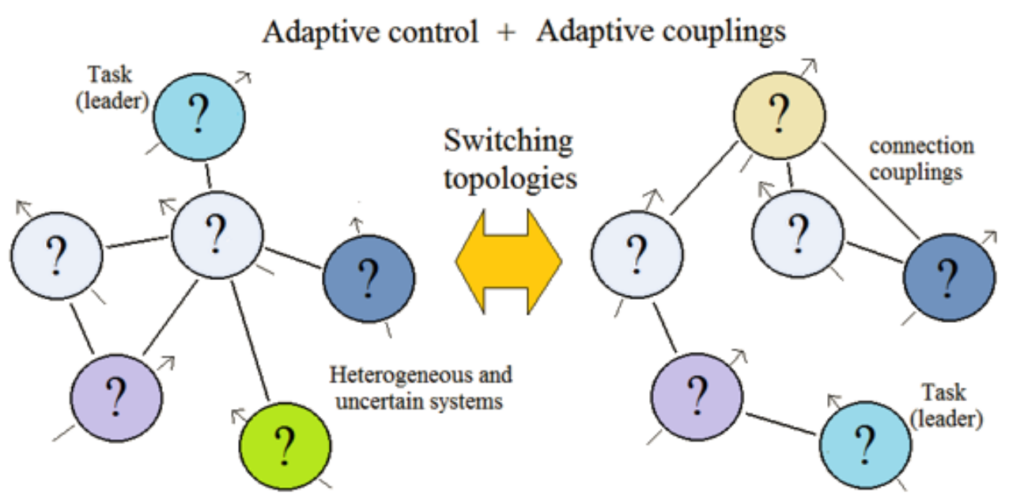
- Distributed learning
- Distributed estimation and distributed adaptation
- Adaptive multi-agent systems
- Uncertain collective systems
Representative Applications
- Systems with human-machine interaction
- Adaptive formations (e.g. of unmanned vehicles)
- Human-in-the-loop control
- Social artificial intelligence
Representative Results
- Baldi S., Azzollini I. A., and Ioannou P. A., “A distributed indirect adaptive approach to cooperative tracking in networks of uncertain single-input single-output systems”, IEEE Transactions on Automatic Control, Vol. 66(10), pp. 4844-4851, 2021. doi:10.1109/TAC.2020.3038742
- Azzollini I. A., Yuan S., Yu W., and Baldi S., “Adaptive leader-follower synchronization over heterogeneous and uncertain networks of linear systems without distributed observer”, IEEE Transactions on Automatic Control, Vol. 66(4), pp. 1925-1931, 2021. doi:10.1109/TAC.2020.3000195
- Baldi S. and Frasca P., “Leaderless synchronization of heterogeneous oscillators by adaptively learning the group model”. IEEE Transactions on Automatic Control, Vol. 65(1), pp. 412-418, 2020. doi:10.1109/TAC.2019.2914664